
Magnetic Loop - Part 2
 Perfect SWR when the loop is tuned.(160m)
Perfect SWR when the loop is tuned.(160m)
Finished you think?
Well, not quite.
The weight of the vacuum cap with mounting plate, motor drive, etc. was too much for this Y-construction.
The cap-assembly + enclosure needed support.
So I decided to go for a +-construction...
...
to be continued...... PA0KV
Busy day today... may 29, 2009....
Creating the +-joint was easy using a piece of Trespa and bending some aluminum strip.
The white stuff in
the middle of the epoxy tubing is glue.
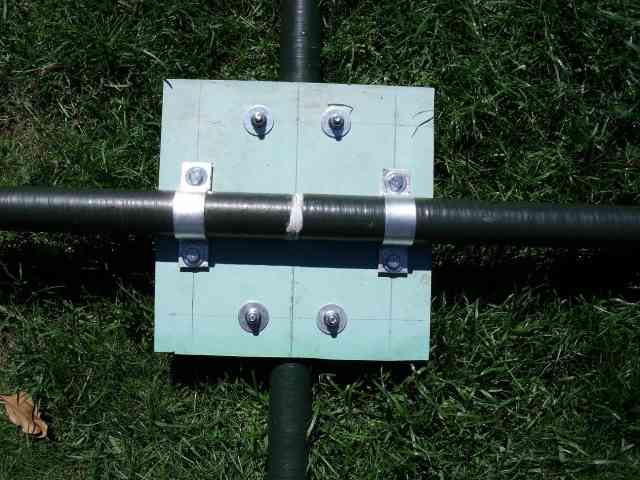 Cross section of horizontal & vertical pole.
Cross section of horizontal & vertical pole.
 The new assembly..
The new assembly..
The vacuum cap has to be 'all weather proof' ...
... here the 160 mm PVC enclosure with glued PVC support
to fit on the epoxy tube.


The wires for cap-motor and slide-pot meter are lead through the vertical tube of the +-joint.
In some way this feels better than leading them through the copper loop.
I can't get it out of my mind that leading the wires through the copper loop has some bad influence on the loop's
performance.
Another thing was keeping my mind busy. 
How to mount the cap-assembly into its
enclosure without drilling
holes in it?
Holes would make it less 'all weather proof'.
Well, after another cup of coffee and some
serious 'number-crunching'
I came up with this....
To be continued...
11 june 2009 ..
This is the idea... turning the cable-tensioner will push the doorstop upwards and the base-plate downwards.


Okay, let's put it up... Two high tech equipment in one picture.....




Final position. Shack view on the loop
Now I'm testing it... first rapports from PA-land on 80 and 160 where very good.
May 2013.
Designed with the loop-calculators on the web it should tune on 160, 80 and 40M.
But in practice the loop has to be a little bit smaller in diameter to tune it on 40M.
Too much L in the circuit in this setup.
Bandwidth.
On 80M, tuned 1:1 with the vacuum cap, bandwidth is +/- 5.5 kc, swr 1.5:1
On 160M, "" "" +/- 1.1 kc, swr 1.5:1
The vacuum cap is a 5KV type so 100 watts is save.
In compare with my Inv-V on 80m there is little or no difference in send and received reports.
(Local European contacts.)
But the Loop is much more quiet and no splatter from nearby stations.
See "Projects" for an advanced controller for this loop!
73's, Twan - PA0KV
TOP